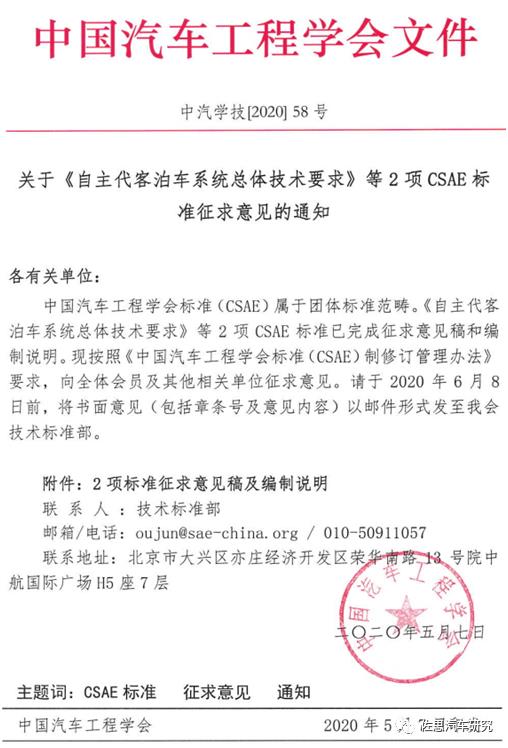
On May 7th, China Automotive Engineering Society issued a notice for soliciting opinions on the standard of Overall Technical Requirements for Autonomous parking service System. The full text of "General Technical Requirements for Autonomous parking service System" (draft for comments) can be downloaded here: http://csae.sae-china.org/a3660.html?. from=timeline
Compilation Description of General Technical Requirements for Autonomous parking service System
First, the work profile
1.1 Source of tasks
The group standard "Overall Technical Requirements for Autonomous parking service System" was approved by China Automotive Engineering Society. The document number is ZHSH [2019] No.191, and the task number is 2019-24.
The Technical Standard for Autonomous parking service (AVP) System and Communication (the same as the General Technical Requirements for Autonomous parking service System) was also approved by China Communication Industry Association. Document number of China Communication Industry Association: Zhongtong Xiebiao [2019] No.05, standard number (T/CA401-2019).
This standard was put forward by China Intelligent Networked Automobile Industry Innovation Alliance, China Communication Industry Association Intelligent Networked Committee and Beijing Zuozhi Automobile Technology Co., Ltd., Great Wall Motor Co., Ltd., Automotive Engineering Research Institute of Guangzhou Automobile Group Co., Ltd., Zhejiang Geely Holding Group Co., Ltd., Chongqing Changan Automobile Co., Ltd., Zongmu Technology (Shanghai) Co., Ltd., Yushi Technology (Beijing) Co., Ltd., Bosch (China) Investment Co., Ltd., Valeo Enterprise Management (Shanghai) Co., Ltd., Beijing Baidu Netcom Technology Co., Ltd., State Automobile (Beijing) Intelligent Networked Automobile Research Institute Co., Ltd. Heduo Technology (Beijing) Co., Ltd., Ningbo Yulan Information Technology Co., Ltd., Beijing Chusu Technology Co., Ltd., China FAW Group Co., Ltd., Ford Motor (China) Co., Ltd., Yitong Technology (Beijing) Co., Ltd., Beijing Tingjian Information Technology Co., Ltd., Shanghai Jingzhong Information Technology Co., Ltd., Shanghai Xiboke Information Technology Co., Ltd., Huawei Technology Co., Ltd., Audi (China) Enterprise Management Co., Beijing Automotive Co., Ltd., BMW (China) Automobile Trading Co., Ltd., Porsche (China) Automobile Sales Co., Ltd., Wisdom Interconnection Technology Co., Ltd., China Information and Communication Research Institute, Huizhou Desai Siwei Automobile Electronics Co., Ltd., Beijing Siweitu New Technology Co., Ltd., Ziguang Zhanrui Technology Co., Ltd., General Motors (China) Investment Co., Ltd., Ruijie Network Co., Ltd. and other units drafted.At the same time, I would also like to thank Xiamen New Page Group Co., Ltd., Mainland Investment (China) Co., Ltd., Nanjing Yuebo Power System Co., Ltd., Nissan (China) Investment Co., Ltd., Hubei Automotive Industry Institute, Dongfeng Motor Group Co., Ltd. and other companies for participating in the feedback communication.
1.2 preparation background and objectives
Automatic parking service system (hereinafter referred to as AVP) function definition: the driver gives instructions from the designated drop-off point through the key or mobile APP, and the vehicle can automatically drive to the parking space of the parking lot without the driver’s supervision; The vehicle can automatically drive from the parking space to the designated pick-up point after receiving the instruction; Many cars receive parking instructions at the same time, realizing dynamic automatic waiting to enter the parking space.
During the development and testing of AVP, various units found that there are many differences among parking lots, the AVP solution is not standardized, the positioning and communication technologies are not uniform, the parking lot cloud interface is different, and other standardization problems. It is impossible to realize the independent parking service of different smart cars in the same parking lot or the same smart car in different parking lots, which brings great security risks to the landing of AVP. Therefore, it is urgent to formulate relevant standards and specifications. The primary goal is to improve the security of AVP system, and the second is to speed up the landing of AVP through specification formulation.
This standard group will update the AVP standard once a year, and constantly improve the technical standards in the technical field of AVP subdivision.
1.3 Main working process
On December 14th, 2018, the kick-off meeting of AVP standard research was held in Tage Zhixing, Beijing. In this seminar, the definition of AVP scene library was initially completed, and the complex and diverse parking scenes were divided into seven categories according to obstacles (OBJ), and each category was further subdivided according to conditions such as OBJ speed, driving area, OBJ location, parking lot location, vehicle speed and environment.
The second meeting was held in Zongmu Technology (Xiamen) on January 21, 2019. The third meeting was held on March 8, 2019 at Bosch China Headquarters. The framework of the first draft of AVP standard has been discussed.
The fourth meeting was held on March 22, 2019 at Crowne Plaza Shanghai Silver Star. The fifth seminar was held in Yushi Technology Shanghai Company. The main contents involve: safety scene chapter review, positioning chapter review (including communication and cloud), logo chapter review, parking lot classification chapter review, etc.
The sixth meeting was held on May 31, 2019 in Beijing Yizhuang Guoqi Zhilian. At this point, version 1.0 of AVP standard exposure draft has been completed.
The seventh meeting was held in MOMENTA Suzhou on July 25, 2019. This paper discusses the opinions and suggestions on version 1.0 of the Exposure Draft, and human-computer interaction (HMI) and other contents.
In August, 2019, Mr. Chen Chaozhuo, the leader of AVP standard group, made a report on the work progress of version 1.0 of AVP standard exposure draft to the Automotive Engineering Society, and the expert group of the Automotive Engineering Society put forward more than a dozen amendments.
On September 5, 2019, the eighth meeting was held in the simple conference room in Beijing. According to the requirements of CSAE experts, enrich the security scenarios and test methods, and try to unify the standards of positioning and mapping. Parking lot map scanning is expensive, so it is necessary to unify the map scanning method, so that it can be scanned only once and used by other homes.
The ninth AVP standard seminar was held in Shenzhen Valeo office on October 11, 2019. At the meeting, I heard the report of Mr. Gotzig, an expert of ISOAVP standard group. Mr. Gotzig introduced the global standard ISO 23374 AVPS of AVP, which is expected to be released in late 2020 and early 2021. Teacher Chen Chaozhuo of China AVP standard group also introduced China AVP standard to Gotzig. The two sides reached a mechanism of information sharing and timely communication.
The 10th AVP standard seminar was held in baidu edifice, Beijing on November 22, 2019. Main discussion contents: HMI chapter, AVP flow chart, AVP test chapter, scene and SOTIF, positioning chapter, logo content, and final draft finishing work arrangement.
The 11th AVP standard seminar was held in Beijing State Automobile Zhilian on December 17th, 2019, and the exposure draft version 2.0 was intensively reviewed.
Version 2.0 of the Exposure Draft was completed in January 2020 and submitted to China Automotive Engineering Society and China Communication Industry Association.
II. Principles and main contents of standard preparation
2.1 standard-setting principles
On the basis of fully summarizing and comparing the related standards of parking service (AVP) at home and abroad, we refer to ISO 16787-2016 "Performance Requirements and Test Regulations for Auxiliary Parking System (APS) of Intelligent Transportation System" (published) and ISO23374-2019 "System Framework, Interactive Interface and Vehicle Operation of Automatic parking service System (AVPS) of Intelligent Transportation System" (in the process of compilation).
2.1.1 Principle of Universality The AVP system and communication technical standard proposed in this standard are applicable to single-vehicle terminal scheme, single-yard terminal scheme and yard combination scheme at the same time, with high universality.
2.1.2 Guiding Principles The autonomous parking service (AVP) system and communication technical standards proposed in this standard have a guiding role for the development and application of AVP products in the industry. At present, there are few standards for parking service (AVP) products at home and abroad, and this standard takes the lead in combining experts from all sides in the industry to realize the in-depth research and formulation of the standards for AVP system and communication technology.
2.1.3 Principle of Coordination This standard is in harmony with the parking-related standards published at home and abroad at present, and does not conflict with each other.
2.1.4 Compatibility Principle Various schemes in the industry have been fully considered in the formulation of this standard, and the AVP system and communication technology proposed in the standard have universal applicability.
2.2 Main technical contents of the standard
This standard is divided into seven chapters, which specifies the overall technical specifications and test requirements of the autonomous parking service (AVP) system. The main technical contents include the definition of typical architecture and security scene of AVP system, the requirements for positioning, perception and map of AVP system in different technical routes, the functional requirements for human-computer interaction, cloud platform and motion control of AVP system, and the requirements for test environment and regulations of AVP system.
2.3 Description of key technical issues
The key technical issues involved in this standard mainly include the security scene design, positioning function requirements, high-precision map data specification requirements and sensing function requirements of AVP system. Among them, the safety scene design mainly considers the typical traffic scene of China parking lot, especially the pedestrian safety requirements in the parking lot; The positioning function requirements mainly consider the differences of three technical routes and vehicle control requirements, and put forward the positioning mode requirements and positioning accuracy requirements of different technical routes; High-precision map data specification mainly considers vehicle positioning, path planning and functional requirements of cloud platform, and defines the components and data structure of the map; The sensing function mainly considers the differences of three technical routes and vehicle control requirements, and puts forward the sensing object categories and accuracy requirements of different technical routes.
2.4 the main content of the standard argument
The system definition chapter in this standard is mainly refined according to the three technical routes of the existing AVP system; The system application scene chapter is mainly refined according to the typical traffic scene of China parking lot; The chapter of the overall technical specification of the system is mainly based on the technical requirements of L4 autonomous driving for positioning, perception and high-precision map, as well as the technical requirements of Intelligent Vehicle Infrastructure Cooperative Systems for platform, communication and infrastructure. The chapter on the overall test requirements of the system is mainly put forward after discussing and demonstrating the test regulations of self-driving roads and the characteristics of parking lot traffic scenes.
2.5 standard work basis
The working basis of this standard mainly includes ISO 16787-2016 "Performance Requirements and Test Regulations for Intelligent Transportation System Auxiliary Parking System (APS)" (published), ISO 23374-2019 "Intelligent Transportation System Automatic parking service System (AVPS) System Framework, Interactive Interface and Vehicle Operation" (in the process of compilation), as well as Bosch China, Zongmu Technology, Yushi Technology and Heduo.
Three, the main test (or verification) analysis
None.
Four, the standard involves patents.
None.
Five, the expected social benefits, the role of industrial development.
At present, there is a huge unmet demand in the parking market in China. According to the survey, about 60% of users have strong pain points such as "finding a parking space, waiting for a long time, and parking is difficult", so the Autonomous parking service (AVP) came into being, which is considered to be the fastest landing scene for autonomous driving. Autonomous parking service (AVP) will not only save more than 30% driving time for users, effectively solve many parking pain points for users, but also greatly improve the utilization rate of empty parking spaces in parking lots. At present, most car companies and autonomous driving solutions companies have layouts for autonomous parking service (AVP), but due to the inconsistency of various technical standards and interfaces, the whole industry lacks unified standards, and AVP cannot be popularized. The publication of this standard not only fills the blank of AVP industry standard in China. At the same time, it also realizes the compatibility of various schemes of Autonomous parking service (AVP), so that different brands of vehicles, different AVP schemes and different types of parking lots can realize the landing of the scheme of Autonomous parking service (AVP), which can better optimize the healthy competition in the industry, promote market development and jointly promote the landing of Autonomous parking service (AVP).
Six, the adoption of international standards and foreign advanced standards, and the level of international and foreign similar standards, the comparative analysis of key indicators at home and abroad or the comparison with the relevant data of foreign samples and prototypes tested.
In this standard, the architecture, classification, some functional requirements and test requirements of AVP system are discussed and agreed with ISO 23374 standard preparation experts. As ISO 23374 is still in the process of compilation, this standard has not been directly adopted.
Seven, the position in the standard system, and the existing relevant laws, regulations, rules and related standards, especially the coordination of mandatory standards.
This standard conforms to the requirements of relevant national laws, regulations and relevant mandatory standards, and is in harmony with existing national standards and industry standards.
Eight, the handling of major differences and basis.
Not yet.
Nine, the standard nature of the proposal
This standard is the standard of China Automotive Engineering Society, which belongs to the group standard, and is used voluntarily by the members of the association and the society.
Ten, implement the standard requirements and suggestions.
After the promulgation and implementation of the standards, the standards should be publicized as soon as possible. Once the standard is published, it is suggested that all parties should implement it according to the contents specified in the standard and jointly promote the standardization of Autonomous parking service (AVP).
XI. Suggestions on Abolishing the Existing Relevant Standards
None.
Twelve, other matters that should be explained.
None.
Standard drafting working group
April 16, 2020